Digital road maps that are navigable and contain detailed
traffic-specific and environmental information like the lane curvature
or the lane width contribute significantly to improving the performance
and the reliability of many advanced driver assistance and safety
systems. In the last two decades, both the quality assessment of various
digital road map data and the development of novel map matching
technologies are becoming increasingly important and popular issues,
particularly for safety-critical applications, such as control system of
automobiles, trains or ships. With the rapid development of digital road
maps over the years, current quality-assured digital road map data can
be provided with required accuracy and level of details.
For the purpose of the wrong-way driving detection on the German
autobahn of the research project Ghosthunter, which is operated in
cooperation with the University of the Federal Armed Forces Munich
(UniBwM) and the company NavCert from Braunschweig, a valid, reliable
and comprehensive quality assessment of digital road maps from four
different data providers (two commercial mapmakers: HERE and TomTom; the
volunteered geographic information: OpenStreetMap data; the German
official topographic-cartographic information system: ATKIS-Basis-DLM)
is performed with proposed quality criteria in this work. It aims to
investigate the use potential of these digital road maps for preparation
and development of an intelligent wrong-way driving detection system.
The quality criteria utilized for evaluation of geometric accuracy
(absolute and relative positional accuracy) of the map data are
presented in this work. Moreover the attribute completeness of each
dataset is compared and discussed with prominent examples.
The results show that the map data which have been analyzed can
provide completely the level of accuracy specified in the current
literature. The investigated map data have achieved 2 m RMS absolute
positional accuracy and 1 m RMS relative positional accuracy. It can
also be demonstrated that HERE and TomTom have a higher completeness of
traffic-related attributes, particularly the travel direction and the
number of lanes, and hence are more compliant with road safety
applications than OpenStreetMap and ATKIS-Basis-DLM.
1. INTRODUCTION
In recent times, ghost driver incidents become a major concern for
every individual road user. A ghost driver is an individual who travels
in a wrong direction or completely against traffic flow. Every year
there are almost 2,000 ghost drivers that are responsible for
approximately 80 accidents and 20 fatalities on German autobahn
(BU-Wuppertal, 2012 and ADAC, 2010). In order to enhance road safety,
particularly by entering and exiting an autobahn, a telematics system
for preventing ghost driver incidents will be implemented within the
research project Ghosthunter in cooperation with the University of the
Federal Armed Forces Munich (UniBwM) and the company NavCert from
Braunschweig. This project covers the development of a robust
(D)GNSS-based real-time algorithm for recording accurate vehicle
trajectory data and various types of map matching algorithms for
estimating continuous and reliable vehicle location on the identified
road segment.
Before designing and developing map matching algorithms, the first
major task of the Institute of Engineering Geodesy (IIGS) at the
University of Stuttgart in the project Ghosthunter is a valid, reliable
and comprehensive quality assessment of digital road maps of four
different data providers, amongst which HERE and TomTom are commercial
geodata and the OpenStreetMap (OSM) data is available for free to users,
while the Amtliches Topographisch-Kartographisches Informationssystem
(ATKIS), known as the German official topographic-cartographic
information system, might provide spatial map data of the highest
quality.
The short paper is organized as follows: First previous studies
related to the evaluation of map accuracy assessment are presented. Then
the generated reference trajectory based on GNSS and the quality
criteria are described. Finally the assessment results and the main
conclusion are discussed.
2. RELATED WORK
Digital road maps that are navigable and contain detailed
traffic-specific information like the lane curvature or the lane width
(ADV, 2010) help to improve the performance and reliability of many
intelligent navigation systems and become increasingly popular and
useful for road safety applications. With the growing interest in
quality evaluations of digital road network data, many efforts have been
made and a variety of research methods has been applied to study map
accuracy.
Goodchild and Hunter (1997) developed a simple probabilistic method
to estimate the positional accuracy for geospatial line elements in 1997
applying a buffer polygon of a defined width along the reference track.
After this early attempt, Helbich et al. (2012) made a statistical
comparison between OSM, TomTom and reference data for a well-mapped
German city concerning positional error of junction points using
bidimensional regression and concluded that both OSM and TomTom had a
spatial accuracy within 5-6 meters. Despite the above mentioned
investigations, a research on OSM’s evolution during the years of
2007-2011 is described in Neis et al. (2012), which deals with the
changes in data completeness and topological accuracy of the OSM road
network covering the whole of Germany. These preliminary studies show
that the digital map quality has obviously improved in recent years due
to the rapid technological progress and a growing number of users.
In this paper an efficient and practical method of determining data
accuracy for digital road maps based on well-founded criteria in terms
of absolute positional error and form deviation compared to reference
location is proposed. A quality assessment of spatial road network data
in well-chosen map areas (typical autobahn junctions in Stuttgart, which
is the capital of Baden-Württemberg, Germany) is presented, including
illustration and analysis of the results.
3. GENERATION OF REFERENCE DATE
For the evaluation of absolute positional and shape accuracy of road
segments in the given digital maps and hence the comparison of map
quality between commercial, official and free datasets, precise
kinematic reference trajectories based on differential carrier-phase
GNSS positioning were generated using a high-end geodetic GNSS
two-frequency receiver (Leica Viva GS15) mounted on a land vehicle with
CS15 field controller. The final coordinates of the kinematic GNSS
tracks in the Universal Transverse Mercator (UTM) system with accuracies
better than 10 cm were computed by a specialized GNSS baseline
processing software, named Wa2 (Wa2, 2015), which provides a reliable
and precise offline solution as well as a detailed output protocol.

Figure 1. Autobahn
junction Böblingen-Hulb on Google Maps Satellite View
In this work, the investigations of the quality of the spatial road
network data carried out in this paper were concentrated in entrance and
exit areas on the German autobahn close to Stuttgart, while eight
exemplary autobahn junctions with different geometric designs along the
state highway A81 near Stuttgart (Germany) including eighteen autobahn
entrances and seventeen autobahn exits are considered for the quality
evaluation in Section IV. Figure 1 illustrates one example of the
investigated region, which is a typical cloverleaf interchange with two
entrances and two exits on each side of the autobahn. As shown in Figure
2, the UTM coordinates of the measured points based on high-rate (1 Hz)
kinematic GNSS observations and the road locations in HERE Maps match
apparently very well. Nevertheless the geometric map data to be assessed
(HERE, TomTom, OSM and ATKIS-Basis-DLM) may differ from each other due
to the fact that the road networks from various providers are probably
acquired using different methods.
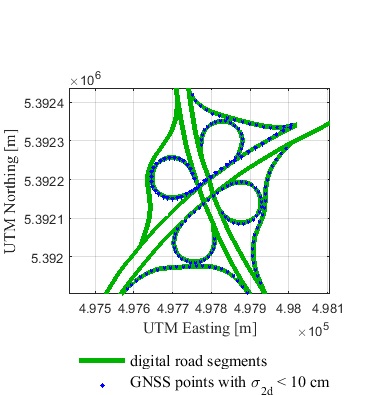
Figure 2. Digital
representation of Autobahn junction Böblingen-Hulb derived from HERE
Maps date in comparison to GNSS-based trajectories.
In order to achieve more realistic assessment results, the shortest
distance between the GNSS point and the circular arc determined from
three shape points of the identified edge in the digital map has been
used to describe the absolute positional accuracy instead of those from
the GNSS point to the identified edge itself, since the shapes of actual
roads, especially at the autobahn junctions, are mostly neither straight
nor polygonal, but rather smoothly curved.
4. QUALITY CRITERIA
The two most important components of spatial data quality for
road safety-related applications, such as ghost driver detection, are
geometric (absolute and relative) accuracy and completeness of
attributes (HERE, 2015 and Neis et al. 2012). To determine the absolute
accuracy of a shape point or a node of a road segment, the coordinate
deviations of UTM easting
 and UTM
northing
and UTM
northing  (grid
zone 32U) and the RMS value for the two-dimensional position deviation
ds with respect to the reference coordinate
(grid
zone 32U) and the RMS value for the two-dimensional position deviation
ds with respect to the reference coordinate
 can be
expressed as:
can be
expressed as:
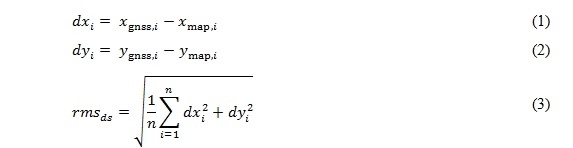
where i is the number of shape points varying from 1 to n
and  and
and
 denote
UTM easting and UTM northing of the foot of perpendicular from each GNSS
point to the correctly identified road link, respectively.
denote
UTM easting and UTM northing of the foot of perpendicular from each GNSS
point to the correctly identified road link, respectively.
Besides the absolute positional accuracy, it is needed to measure
whether an accurate shape of the road is represented (HERE, 2015). Here
the proposed approach for the quality evaluation of relative accuracy
combines two different criteria, namely the difference of orientation
changes:
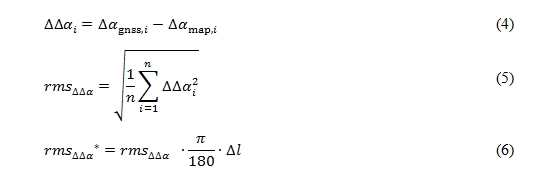
and the curvature difference

at the GNSS points that are derived from the reference trajectory
comparing to the homologous nodes or shape points of linear features in
the digital map. Here the RMS values of ∆∆α and ∆κ are calculated
according to the equations (6) and (8).
To allow for an easier and better comparison for relative accuracy in
respect to rms∆∆α , degrees to meters conversion has been computed with
a factor Dl of 13 meters in (6), which equals about the average
distance between two continuous GNSS points. The converted RMS values
are denoted by the symbol rms∆∆α* (see Table 1).
Taking advantage of the above described criteria, the absolute and
relative positional accuracy of digital road network data to be
investigated in this work can be calculated efficiently. Furthermore,
the completeness of attributes which provide essential information for
routing applications and road safety, such as the direction of traffic
flow and the number of lanes, should be considered (HERE, 2015 and
TomTom, 2014).
5. ASSESSMENT RESULTS
The achieved absolute and relative positional ac-curacies of the
spatial roads database HERE, TomTom, OSM and ATKIS-Basis-DLM are given
in Table 1. From the accuracy assessment results, it can be seen that
the final average RMS values of absolute position error of all the four
datasets are around 2 meters, while the differences between these RMS
values are small: maximum 0.22 meter. In terms of the relative
positional accuracy, the average RMS values of difference of orientation
changes ∆∆a and curvature difference
∆k vary from 4.1° to 5.1° and from 5.3
km-1 to 8.7 km-1, respectively.
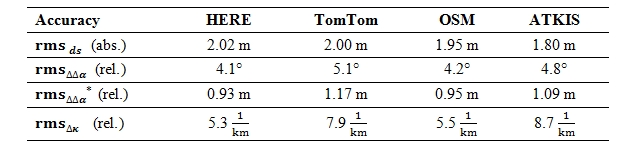
Tab. 1: Comparison of
absolute an relative positional accuracy between HERE, TomTom, OSM and
ATKIS-Basis DLM.
On the other hand, the positional accuracies in the table above,
which are based on our criteria, should be verified by comparing them to
the accuracy specifications in the literature. As reported in AdV
(2010), HERE (2015) and (TomTom, 2014), both HERE and TomTom data that
are in compliance with ADAS (Advanced Driver Assistance Systems) can
reach an absolute positional accuracy better than 5 meters and a
relative positional accuracy better than 1 meter, ATKIS-Basis-DLM has an
geometric accuracy of 3 meters, however, for the crowdsourced OSM no
available information about data accuracy have been found.
Obviously, the four datasets of spatial road net-work data are within
the absolute accuracy values specified in the literature, while the
relative positional error of TomTom and ATKIS has slightly exceeded 1
meter. It has to be mentioned that there are also road data with lower
levels of positional accuracy that do not fulfil the ADAS requirement.
The results of accuracy assessment of such comparably inaccurate road
segments based on only one autobahn entrance and two autobahn exit ramps
show that the absolute positional accuracy is about 4 meters, while the
level of the relative positional accuracy remains at around 1 meter. In
addition to positional accuracy, attribute completeness of geographic
data is also one of the main quality elements of our investigation
(Wiltschko & Kaufmann, 2005). Table 2 summarizes several relevant
attributes for vehicle telematics applications (such as routing and
navigation) that are contained in our spatial databases: Here, TomTom,
OSM and ATKIS-Basis-DLM, respectively. Although OSM and ATKIS, as shown
in the table below, lack the attribute of travel direction, the
disadvantage has been compensated by our own acquired information.
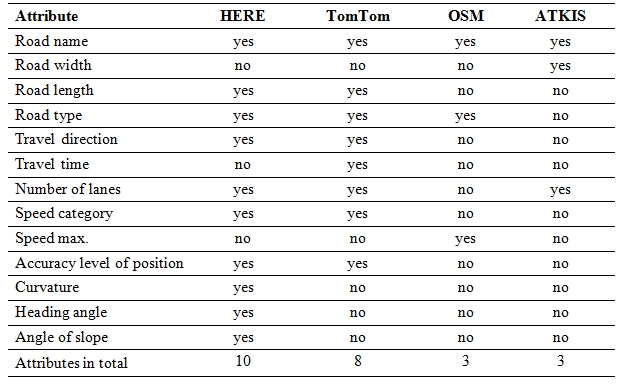
Tab. 2: Overview of
traffic-related map attributes of our digital road network data, as
documented in the literature AdV (2010), HERE (2015), OSM (2016) and
TomTom (2014)
6. CONCLUSION
In this paper a detailed assessment of geometric accuracy and
attribute completeness for four different spatial road network datasets
that cover commercial, official and free data source has been performed.
With the focus on the autobahn entrance and exit, our proposed
evaluation approach based on high-precision GNSS trajectories was
implemented successfully. The investigated map data products have
achieved a higher level of accuracy than specified in literature: an
absolute positional accuracy of 2 meters and a relative positional
accuracy of 1 meter. The difference of the accuracy values for the four
datasets differ only slightly and is based on a sample of limited size
for comparison of investigated digital map data only.
On the other hand, HERE and TomTom have a higher completeness of
telematics-related attributes, particularly the travel direction and the
speed category, and hence are more compliant with road safety
applications than OSM and ATKIS-Basis-DLM.
ACKNOWLEDGEMENT
This work results from the research project Ghosthunter, which has
been granted and funded by the German Federal Ministry for Economic
Affairs and Energy (BMWi) and the German Aerospace Centre (DLR) under
grant number 50 NA 1524. The authors gratefully acknowledge the
cooperation of the Institute of Space Technology and Space Applications
at the University of the Federal Armed Forces Munich in this project.
REFERENCES
ADAC (2010): Geisterfahrer – Tipps für den Ernstfall,
http://www.adac.de/infotestrat/adac-im-einsatz/motorwelt/geisterfahrer.aspx,
last accessed April 2015.
ADV (2010): Arbeitsgemeinschaft der Vermessungsverwaltungen der
Länder der Bundesrepublik Deutschland (AdV): ATKIS-Objektartenkatalog
Basis-DLM 6.0 – BW, Dokumentation zur Modellierung der Geoinformationen
des amtlichen Vermessungswesens, 2010.
ADV (2008): Arbeitsgemeinschaft der Vermessungsverwaltungen der
Länder der Bundesrepublik Deutschland (AdV): Erläuterung zum ATKIS®
Basis-DLM. Dokumentation zur Modellierung der Geoinformationen des
amtlichen Vermessungswesens, Version 6.0, 2008.
BU-WUPPERTAL (2012): Bergische Universität Wuppertal, Bundesanstalt
für Straßenwesen: Falschfahrten auf Autobahnen, Schlussbericht, 2012.
GOODCHILD, M. F., HUNTER, G. J. (1997): A simple positional accuracy
measure for linear features, int. J. Geographical Information Science,
Vol.11, No.3, pp. 299–306, 1997.
HELBICH, M., AMELUNXEN, C., NEIS, P. (2012): Comparative Spatial
Analysis of Positional Accuracy of OpenStreetMap and Proprietary
Geodata, Int. GI_Forum, Salzburg, Austria, 2012.
HERE (2015): HERE File GeoDatabase Reference Manual v2.6, release
date: Chicago, USA, January 1, 2015.
NEIS, P., ZIELSTRA, D., ZIPF, A. (2012): The Street Network Evolution
of Crowdsourced Maps: OpenStreetMap in Germany 2007–2011, Future
Internet, 4, pp. 1–21, 2012.
OSM (2016): OpenStreetMap: Attribuierung von Straßen in Deutschland.
http://wiki.openstreetmap.org/wiki/Attribuierung_von_Stra%C3%9Fen_in_Deutschland,
last accessed January 2016.
SCHINDLER, A., MAIER, G., JANDA, F. (2012): Generation of High
Precision Digital Maps using Circular Arc Splines, IEEE Intelligent
Vehicles Symposium, pp. 246–251, 2012.
TOMTOM (2014): TomTom MultiNet® Shapefile, Format Specification 4.7,
Doc version 1.2.0, © TomTom Global Content BV and TomTom North America,
Inc., 2014.
WA2 (2015): WaSoft: GNSS Baseline Processing Engine Wa2.
http://www.wasoft.de/e/wa2/index.html, last accessed November 2015.
WILTSCHKO, T., KAUFMANN, T. (2005): A Quality Model for Quality
Assurance of Road Information, EuroRoadS project, 2005.
BIOGRAPHICAL NOTES
M.Sc. Jinyue Wang
2007 – 2008 Studies of Geodesy in P.R. China (University of Wuhan)
2009 – 2015 Studies of Geodesy in Germany (University of Stuttgart)
2015 – Research
Associate at Institute of Engineering Geodesy, University of Stuttgart
Dr.-Ing. Martin Metzner
1995 – 2001 Studies of Geodesy in Darmstadt (Technical University of
Darmstadt)
2001 – 2006 Research Associate at the Institute of Geodesy, Technical
University of Darmstadt
2006
Dr.-Ing. in Geodesy (Technical University of Darmstadt)
2006
Deputy Director at Institute of Engineering Geodesy (formerly Institute
for Applications of Geodesy
to Engineering), University of Stuttgart
Prof. Dr.-Ing. habil. Volker Schwieger
1983 – 1989 Studies of Geodesy in Hannover
1989
Dipl.-Ing. in Geodesy (University of Hannover)
1991 – 2000 Research Associate at the Institute of Geodesy, University
of Hannover
1998
Dr.-Ing. in Geodesy (University of Hannover)
2000 – 2001 Research Associate of GFZ German Research Center for
Geosciences in Potsdam
2002 – 2010 Senior Research Assistant at Institute for Applications of
Geodesy to Engineering, University of
Stuttgart
2003
Head of Department “Metrology” at Institute for Applications of Geodesy
to Engineering, University
of Stuttgart
2004
Habilitation (University of Stuttgart)
2010
Director of the Institute of Engineering Geodesy (formerly Institute for
Applications of Geodesy to
Engineering), University of Stuttgart
CONTACTS
M.Sc. Jinyue Wang / Dr.-Ing. Martin Metzner / Prof. Dr.-Ing. habil.
Volker Schwieger
University of Stuttgart
Institute of Engineering Geodesy
Geschwister-Scholl-Str. 24 D
D-70174 Stuttgart
GERMANY
Tel. + 49/711-685-84060 | -84043| -84040
Fax + 49/711-685-84044
Email:
[email protected] /
[email protected]
[email protected]
Web site: http://www.uni-stuttgart.de/ingeo/

























